
Önvezető autók: hogy működik és mennyire biztonságos a robotaxi, illetve kik Elon Musk fő konkurensei?
Új korszak a közlekedésben vagy csak egy múló trend?
2025 júliusában megjelentek a texasi Austin utcáin az első önvezető autók. Ezek a Tesla Robotaxi nyilvános tesztje keretében kezdték el róni az utakat, amely a cég egyik legjobban várt lépése volt az elmúlt években. A vállalat ugyanis többször is megígérte már, hogy az autógyártás mellett egy teljes körű önvezető közlekedési rendszert is kifejlesztenének.
Ukrán társblogunk szerzője, Pavlo Kirnoz most elmagyarázza, hogyan működik ez a technológia, és megvalósítható-e mindez. A Tesla természetesen messze nem az egyetlen cég, amely fantáziát lát a sofőr nélküli taxizásban, így cikkünkben nemcsak az ilyen rendszerek működéséről lesz szó, de arról is, kik versenyeznek ebben a szektorban.
Mi is az a Tesla Robotaxi?
Maga a koncepció olyan önvezető taxikról szól, amelyekhez már nincs szükség sofőrre, helyette a mesterséges intelligencia (AI/MI) végzi el a munkát. Az autót egy appon keresztül hívhatjuk ugyanúgy, mint például az Uber vagy a Bolt esetén. Elon Muskék persze nem egyedül igyekeznek ezt megvalósítani, komoly versenytársaik például a Google-anyacég Alphabethez tartozó Waymo (melynek autói nemrég azzal kerültek be a hírekbe, hogy a Los Angeles-i tüntetők felgyújtották azokat – a ford.) vagy éppen az Amazon-féle Zoox. (Bár nem a taxizás felől közelítve, de több magyar cég is jelentős eredményeket ért el, köztük a járművek kommunikációjával foglalkozó Commsignia és a vezetést automatizáló szoftvereket és hardvereket fejlesztő aiMotive – a ford.)
Míg a többi cég lidarok (lézerfényes, a környezetet 3D-ben feltérképező érzékelők – a ford.), kamerák és radarok kombinációjára támaszkodik, a Tesla a vision-first megközelítést alkalmazza, kamerákat és neurális hálókat használva. E megközelítésben az autó lényegében úgy látja a világot, mint az ember. Elsősorban képekkel dolgozik, nem használnak lidart vagy más szkennereket.
Forrás: Tesla
A vállalat arra számít, hogy ezzel az önvezető járművek gyorsabban skálázhatók drága berendezésekre elhasznált erőforrások nélkül. (Bár a Financial Times egy július végi cikke szerint egyes szakértők kételkednek abban, hogy az elsősorban kamerákra alapuló rendszer önmagában elegendő-e a biztonsághoz – a ford.)
A Teslánál 2025 végére tervezik a Robotaxi teljes körű bevezetését. Az austini tesztelés az ezt megelőző utolsó előtti szakasz. Az elképzelésük az, hogy az önvezető Teslák egyfajta ökoszisztémát alkotnak majd: a járművek feltöltik önmagukat, kommunikálnak egymással, és automatikusan frissítik is a rendszerüket.
Mit tesztelnek, hol és hogyan?
A Tesla Robotaxi első nyilvános, korlátozott, biztonsági felügyelet mellett történő tesztjei azért zajlanak Austinban, mert itt működik a vállalat egyik legnagyobb gyára. Itt készül a Cybertruck és a Model Y, és egyúttal ez a cég központja is. Nem véletlenül választották ezt a régiót: Austinban mérsékeltek az útviszonyok, ritkán havazik, új az infrastruktúra, és egy számukra politikailag kedvező, a technológiai újításokat támogató kormányzat van hatalmon, leegyszerűsítve az önvezető rendszerek tesztelésének jogi hátterét.
Az, hogy a tesztprogram egyelőre rendkívül korlátozott, azt jelenti, hogy:
- nagyon kevés ténylegesen önvezető autóval lehet találkozni az utakon,
- ezek előre meghatározott, földrajzi korlátozásokkal ellátott útvonalakon haladnak, ahol a rendszer elég magabiztosan működik, például a kevésbé forgalmas területeken,
- egyelőre minden autóban ott ül a Tesla egy mérnöke, aki ellenőrzi a folyamatot és a rendszer működését, szükség esetén pedig bármikor átveheti az irányítást.
A tesztüzemben jelenleg csak a cég alkalmazottai és korlátozott számú partnerük vehet részt. Vagyis ebben a fázisban külsősök még nem rendelhetnek tőlük Robotaxit, bár a cég appjának forráskódjában az ezt majd a tervek szerint biztosító részek már fellelhetők.
A Tesla egyelőre nem teszi lehetővé, hogy harmadik fél utasai az alkalmazáson keresztül hívják a Robotaxit, de a RideHail és a Robotaxi Mode már megtalálható a kódjában. Ez arra utalhat, hogy a későbbiekben a bétatesztelést az ügyfelek bevonásával tervezhetik folytatni.
A technológiai oldal: hogyan működik mindez?
Ahhoz, hogy mindez flottul működjön, sok apró technikai részlet szükséges. Ez egy összetett rendszer, amely ötvözi a neurális hálókat, a számítógépes látást, a szenzorokat és a nagy teljesítményű számítástechnikát. A Robotaxi számos technikai aspektusát már említettük, de nézzük meg, pontosan hogyan működik!
Teljes önvezetés (full self-driving, FSD)
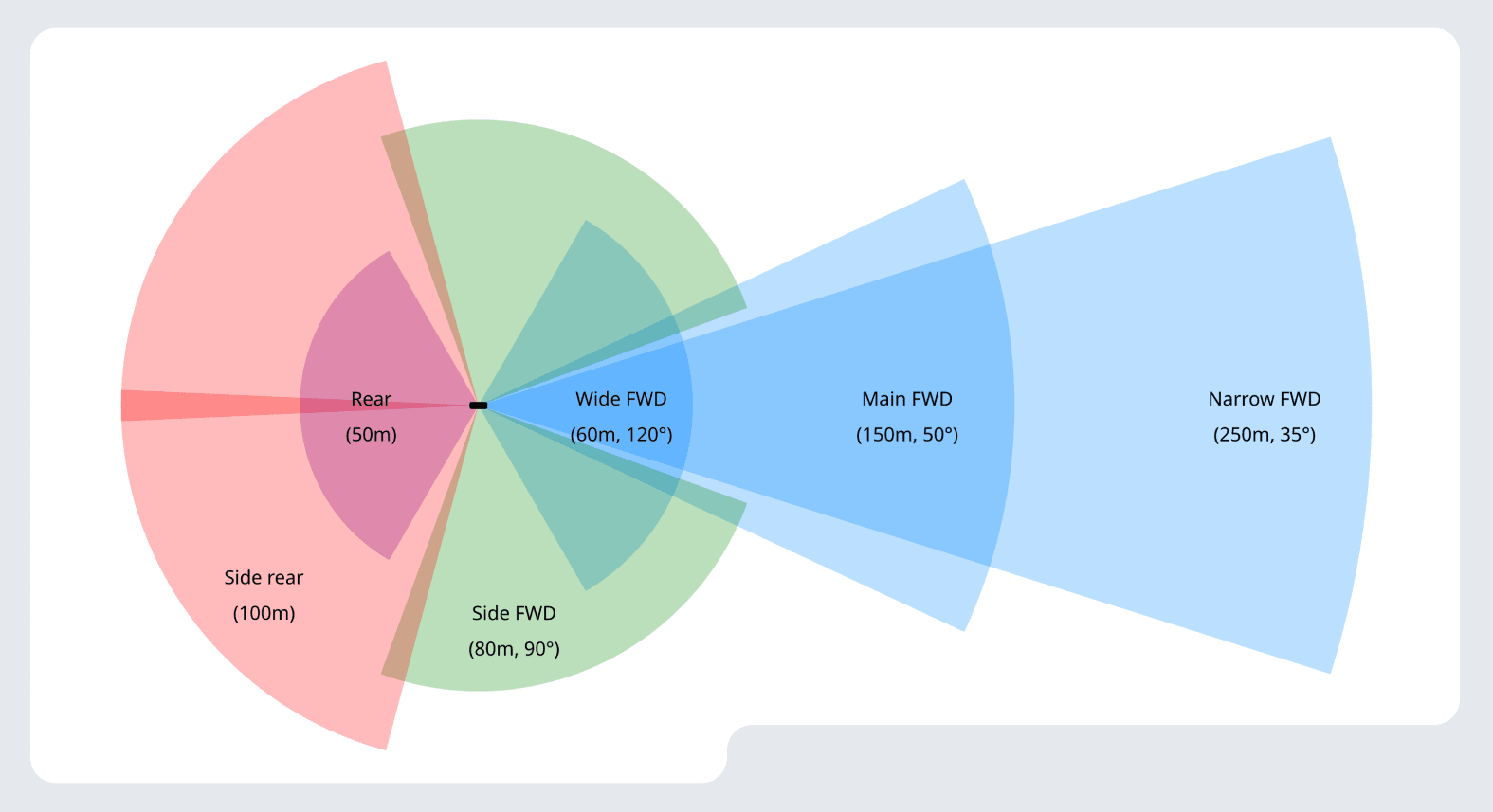
A versenytársaival ellentétben a Tesla nem használ lidarokat, amelyeket egyébként az AR-alkalmazásokban, az építőiparban vagy éppen az iPhone-ainkban is alkalmaznak a környezet 3D-s feltérképezésére. Helyettük kizárólag kamerákra, számítógépes látásra és neurális hálózatokra támaszkodnak. A céljuk, hogy a vision-first megközelítésű rendszerük a környezetet érzékelő kamerákból érkező vizuális információkat felhasználva a lehető legjobban utánozza az emberi vezetést. Ehhez a következők kellenek:
- 8 kamera: ezek 360 fokos látószöget biztosítanak a számítógépes látáshoz.
Így működik a nyolckamerás, 360 fokos környezetpásztázás
Forrás: Wikimedia Commons
- A Tesla Hardware 4 (HW4) nevű korszerű számítástechnikai egység, amely valós időben dolgozza fel a kamerák által rögzített videókat, és neurális hálókkal következtetéseket von le belőlük a jármű fedélzetén, külső szerverek nélkül.
- Az FSD neurális hálók, amelyek több milliárd kilométernyi valós utazáson betanított modellek, így meg tudják jósolni más közlekedők szándékait. Például ha egy gyalogos átkelne az úttesten, egy autó sávot váltana és így tovább.
- A valós idejű észlelés és tervezés során a jármű néhány ezredmásodpercenként 3D-s térképet készít a környezetéről, kiválasztja, hogy mit tegyen (kerülőút, fékezés, gyorsítás), és jeleket küld azokhoz a hardverekhez, amelyek ezt megvalósítják (kormánykerék, fék, gázpedál).
Képzések ebben a témában:
GIS a gyakorlatban
Csaba Szigeti-Pap
Senior GIS Analyst, Cushman & Wakefield

Üzleti AI képzés vezetőknek
Balázs Koltai
AI Advocate & Educator, Digital Transformation Leader, Ex: Aegon Global Technology, K&H Csoport, Deutsche Telekom

Tesla Dojo
Minden AI-modellnek kellenek adatok, amelyekből „tanulhat”, amelyhez számítások ezreit kell elvégeznie. Ezért az AI-rendszerek működtetéséhez nagy teljesítményű hardverre van szükség. (Nem véletlen, hogy egyre égetőbb kérdés az AI energiaigényének fedezése – a ford.) A Tesla ezért hozta létre a saját szuperszámítógépét, a Dojót, amelyen az FSD-modelljeit trenírozza.
A Dojo több tízmillió utazás során keletkezett, a világ összes Teslája által felvett videókat dolgozza fel, ez az úgynevezett flottatanulás (fleet learning). A hálózatokat a szélsőséges esetek, ritka vagy összetett helyzetek kezelésére is tanítják, például a nem egyértelmű jelzésekre, a szokatlan gyalogosi viselkedésekre és a vészfékezésre. A Dojóval a Tesla nem egy előre megírt logikát alkot meg, hanem megtanítja az AI-modelljét a komplex és új helyzetekben való döntéshozatalra.
Az önvezető Teslák három összetevője
A Tesla önvezetési rendszere három fő modulból áll.
- Érzékelés: a kamerák képeket továbbítanak egy neurális hálózatnak. A rendszer ezután meghatározza az útjelzések, szegélyek, tárgyak, élőlények és ideiglenes akadályok helyét. Minden, a környezetről összegyűjtött információ egyetlen virtuális 3D-s térképpé áll össze.
- Tervezés: ezen térkép alapján a rendszer kiválaszt egy útvonalat. Ennek része, hogy hol kell majd elkanyarodni, fékezni vagy éppen gyorsítani. A rendszer elemzi a többi résztvevő mozgásáról készített előrejelzéseket, és ez alapján dönt az optimális közlekedésről.
- Vezérlés: az előző lépéseket követően a rendszer minden szükséges jelet továbbküld a kormánykerék, a pedálok és a fék számára, így az autó befutja a megjelölt pályát, közben folyamatosan alkalmazkodva a változásokhoz.
Ez a három modul közösen alkot egy frissítési ciklust. Működés közben ez a folyamat ezredmásodpercek alatt zajlik le; egy, a kamera által látott helyzettől az autó „cselekvéséig” kevesebb mint 100 ezredmásodpercre van szüksége.


Belső biztonsági rendszerek
Az ötlet, hogy önvezető taxik róják az utcákat, vagánynak és futurisztikusnak tűnik. Ugyanakkor ha emellé nincsenek megbízható biztonsági rendszerek, a potenciális utasok kétszer is meggondolják, beüljenek-e egy virtuális sofőr autójába, az államok és városok vezetése pedig jó eséllyel nem engedélyezi az ilyesmit. A Tesla és a versenytársai ezért számos biztonsággal kapcsolatos újítást bevezettek.
A kritikus rendszerek duplikálása
Ezek a cégek, köztük a Tesla is a redundancia elvét követik. Ez azt jelenti, hogy a jármű minden létfontosságú funkcióját megduplázzák. Ha meghibásodik például a fő áramforrás, a rendszer át tud kapcsolni egy tartalékra. A fent már említett HW4 emellett két független processzorral is rendelkezik, amelyek egymást tudják ellenőrizni. Ugyanez a helyzet a fék- és kormányrendszerrel is. Meghibásodás esetén bármelyik komponens azonnal kikapcsolható vagy biztonsági módba helyezhető.
Éles helyzetek és hibakezelés
Az FSD-rendszer folyamatosan vizsgálja a környezetet, és azt is, hogy mennyire „magabiztos” a saját döntéseiben. Ha az algoritmus bizonytalan abban, hogy helyesen ismert-e fel egy helyzetet, akkor:
- lassíthat vagy leállhat,
- kérheti egy mérnök bevonását (a tesztelési szakaszban),
- illetve elküldheti az adatokat további elemzésre a Tesla szervereire.
(Ugyanakkor a biztonsággal kapcsolatos kételyeket erősítheti az az augusztus eleji floridai ítélet, ahol a céget tették felelőssé egy halálos baleset miatti perben – a ford.)
Távoli, vezeték nélküli (OTA) frissítések
A hagyományos autókkal ellentétben a Tesla a szoftverét távoli, vezeték nélküli (over-the-air, OTA) frissítésekkel tartja naprakészen. Vagyis az algoritmusok új verzióinak és a neurális hálózat fejlesztéseinek letöltéséhez nem kell a járművet bevinni egy szervizbe. Ez azt jelenti, hogy a kocsik menet közben, hasonló autók millióinak adatai alapján képesek fejleszteni saját működésüket.
Képzések ebben a témában:
Etikus hackelés kezdőknek
Tamás Bőhm
Senior cybersecurity engineer

AI a gyakorlatban: ChatGPT, Gemini és más eszközök
András Schenkerik
Founder & CEO, Emprove

Tényleg önvezetők ezek az autók?
Bár általában jó a Tesla marketingje (leszámítva a cégvezetőjük az üzletre nem feltétlen jó hatással bíró politikai tevékenységét – a ford.), fel kell tenni a kérdést, mennyire mondanak igazat, amikor a Robotaxijukat teljesen önvezető járműként népszerűsítik. Ebben az SAE International (korábban: Society of Automotive Engineers) globális szakmai és szabványügyi szervezet nemzetközileg használt osztályozása segít.
Az önvezetés 6 szintje
A szervezet saját rendszere 6 szintre osztja az önvezető járműveket, ahol a nullás szinten kizárólag az ember vezet, az ötössel jelölt autók pedig teljesen automatizáltak.
- 0. szint, nincs automatizáció: a sofőré minden felelősség, az autóban nincsenek olyan rendszerek, amelyek önállóan kormányoznának vagy fékeznének. A legtöbb mai autó ilyen.
- 1. szint, vezetéstámogató rendszerek használata: ezen járművek rendszere képes kormányozni vagy fékezni, de mindkettőt nem tudja egyszerre.
- 2. szint, részleges automatizáció: ezeknek a kocsiknak a rendszere egyszerre képes irányítani a mozgást (kormányzás) és a sebességet (fék és gázpedál használata). Ezen a szinten van a Tesla Autopilot és a General Motors (GM) által fejlesztett Super Cruise rendszer.
- 3. szint, feltételes automatizálás: az autó képes önmagát vezetni, de csak korlátozott körülmények között, például autópályán vagy ideális időjárás esetén.
- 4. szint, magas fokú automatizálás: a rendszer bizonyos helyeken teljes mértékben képes a sofőr beavatkozása nélkül irányítani a járművet. Ha pedig a kocsi elhagyja az „önvezető zónát", akkor megáll. Erre képesek például a Waymo Phoenix autói és a GM-féle Cruise is ebbe a kategóriába volt besorolva a 2023-as incidensükig (amikor a jármű elütött egy gyalogost, a cég engedélyeit ideiglenesen felfüggesztették, a vállalat később elismerte, hogy pontatlanul jelezte az esetet a releváns hatóságnak, ezért bírságot kapott, azóta pedig ezt a szolgáltatását nem működteti tovább – a ford.).
- 5. szint, teljes automatizálás: az autó minden körülmények között képes úgy vezetni, mint egy ember. Ezek a kocsik már nem is igényelnek beavatkozást lehetővé tevő berendezéseket, például vezérlőrendszereket, ahogyan sofőrt sem. Ez azonban még csak egy elvi síkon létező kategória, ugyanis egyelőre a gyakorlatban még egyetlen vállalat sem érte el ezt a szintet.
Hol tart a Tesla?
Hivatalosan a Tesla önvezető rendszere jelenleg a 2+-os szintnek felel meg. Az autó képes ugyanis önállóan kormányozni, fékezni, kanyarodni és parkolni, de a vezetőnek jelenleg a kormányon kell tartania a kezét, és bármikor készen kell állnia az esetleges beavatkozásra.
A Robotaxi Austinban végzett tesztjei során azonban a vállalat már a 4-es szint felé való elmozdulásról beszél. Ez azonban a gyakorlatban egyelőre még a következőket jelenti náluk:
- az autó teljesen automatikusan tudna közlekedni egy meghatározott földrajzi területen belül, emberi beavatkozás nélkül,
- ám a volán mögött továbbra is ülne egy biztonsági sofőr vagy egy mérnök, ez pedig rögtön 2-es vagy 3-as szintre csökkenti az önvezetés szintjét.
Tehát a Tesla még nem érte el ténylegesen a 4-es szintű autonómiát, igaz, már teszteli azokat a forgatókönyveket, amelyekkel közelebb kerülhet ehhez a célhoz.


A Tesla fő riválisai
Bár a Tesla szereti magát egyedinek beállítani, több óriáscég erős versenytársa. Ráadásul mindegyikük egyedi megközelítéssel tekint a területetre.
A Google-féle Waymo
A Google-anyacég Alphabet szolgáltatása az iparág egyik legerősebb és legrégebbi szereplője. A megközelítésük szöges ellentéte a Tesláénak. Lidart, radart és HD-térképeket használnak centiméteres pontossággal és speciális navigációval. Így a Waymo teljesen autonóm, sofőr nélküli taxikat járathat olyan városokban, mint Phoenix vagy San Francisco.
Autóik ellenőrzött körülmények között nagyon pontosak, de a rendszer nehezen skálázható, hiszen minden egyes városra új HD-térképet kell készíteni, és a rendszer a lefedettségi területeken kívül gyakran leáll. Mindenesetre az SAE értékelési kritériumai szerint a Waymo már sikeresen elérte a 4-es szintet.
A GM-féle Cruise bukása
A feljebb már emlegetett GM-féle Cruise is a „nehéztüzérséget" választotta lidarok, radarok és térképek formájában. Önvezető járműveit San Franciscóban, Austinban és Phoenixben tesztelték, amelyek teljesen vezető nélkül is képesek voltak közlekedni. Ám a már említett, 2023-as súlyos baleset után, amikor egy Cruise autó elgázolt egy gyalogost, a vállalat kénytelen volt felfüggeszteni a szolgáltatás működését, és a szabályozó hatóságok is fokozottabban figyelik a munkájukat.
2024 végén a GM úgy döntött, hogy a Cruise taxiszolgáltatást nem folytatja önálló üzletágként, hanem az azzal kapcsolatos fejlesztéseket integrálja a vezetéstámogató rendszereibe, mint amilyen a már szintén említett, 2-es szintű Super Cruise. Ezzel a korábban azon dolgozó mérnöki csapatukat és az általuk elért technológiai fejlesztéseket beolvasztották a GM saját fejlesztőcsapataiba. A Cruise eredeti, robotaxiként működő Origin modelljének sorozatgyártását és az ahhoz kapcsolódó önálló szolgáltatását felfüggesztették, a vezetéstámogató rendszerük viszont már húsz modellben elérhető.
Zoox az Amazontól
A Zoox egyedülálló versenytárs. Nem egy klasszikus autókat alakítanak át, hanem egy egyedi robotautót hoznak létre a semmiből: szimmetrikus, első és hátsó rész nélküli járműveket, kétirányú vezérléssel és nagy belső térrel. Megközelítésük igen futurisztikus, ezeknek az autóknak ugyanis még pedáljuk vagy kormányuk sincsen.

Forrás: Zoox
A tesztelés már zajlik, de még utasok nélkül és csak zárt területen. Ez egy hosszabb távú projekt, de az Amazon áll mögötte, ami két dolgot jelent: szinte kimeríthetetlen erőforrásokat, és egy elképesztően fejlett logisztikai infrastruktúrát.
Összegzés
Ami néhány éve még álomnak tűnt, az ma már egy létező eszköz a techóriások kezében. A szakértők azonban még nem tudják pontosan megjósolni, mikor jelennek meg a teljesen önvezető taxik az utcáinkon.
Ugyanakkor anélkül, hogy jóslásokba bocsátkoznánk, egy dolog biztos: a biztonság továbbra is nyitott kérdés marad. Már a tesztelés során történt számos incidens, a kockázatok pedig egyelőre nem tűntek el. Mint minden új technológia esetében, itt is jobb megvárni, mire elmúlik az újdonság körüli felhajtás, és a rendszer kiforrottabbá válik.
Ugyanis kizárólag ezután beszélhetünk majd megbízható, gyors és – ami a legfontosabb – biztonságos szolgáltatásról. A fejlesztések folytatódnak. Az előrehaladás üteme, a bevont erőforrások és a fontosabb szereplők érdeklődésének mértéke alapján az önvezető autók valóban a jövőt jelenthetik. És arra is jó esély látszik, hogy ez előbb jöjjön el, mint azt várjuk.
Pavlo Kirnoz cikkét Tarnay Kristóf Ábel fordította. A fordítói megjegyzések mellett a riválisokról szóló részben a Cruise-t leíró szöveg második fele aktualizálva lett.


